2369
Проект смотритель. Часть 1. Начало
Эта статья является частью цикла
- Проект смотритель. Часть 1. Начало
- Проект смотритель. Часть 2. Дизайн
- Проект смотритель. Часть 3. Фоторезист
- Проект смотритель. Часть 4. Шасси
- Проект смотритель. Часть 5. Гусеницы
- Проект смотритель. Часть 6. Моделирование и печать
- Проект смотритель. Часть 7. Железо
- Проект смотритель. Часть 8. Софт
- Проект смотритель. Часть 9. Зарядная станция
- Проект смотритель. Часть 10. Bluetooth
- Проект смотритель. Часть 11. Home assistant
- Codex написал WASD управление для Смотрителя
Базовая версия
Проект смотритель - удаленно управляемый робот на гусеничной платформе с трансляцией картинки с камерой.
Зачем? Ради фана - этот проект практически квинтесенция моих увлечений - электроника, 3d-печать, программирование микроконтроллеров и в целом все, что можно включить в сферу DIY. Но если уж придумывать практическое применение - то было бы удобно при срабатывании датчика протечки иметь возможность удаленно посмотреть в чем дело прежде чем срываться с работы / поездки (было несколько ложно-положительных кейсов).
Тогда
Задумал я проект, страшно сказать, 10 лет назад. У меня уже был репозиторий на гитхаб с описанием хотелок и даже некоторой реализацией. Кажется, это первый мой репозиторий на github, который я без знаний git вел через сайт. Тогда это была Arduino Uno, подключенная к драйверу двигателя с 2 УЗ-дальномерами, без камеры. Реализовать задуманное полностью не было ни сил, ни средств, поэтому проект был отложен на неопределенный срок.
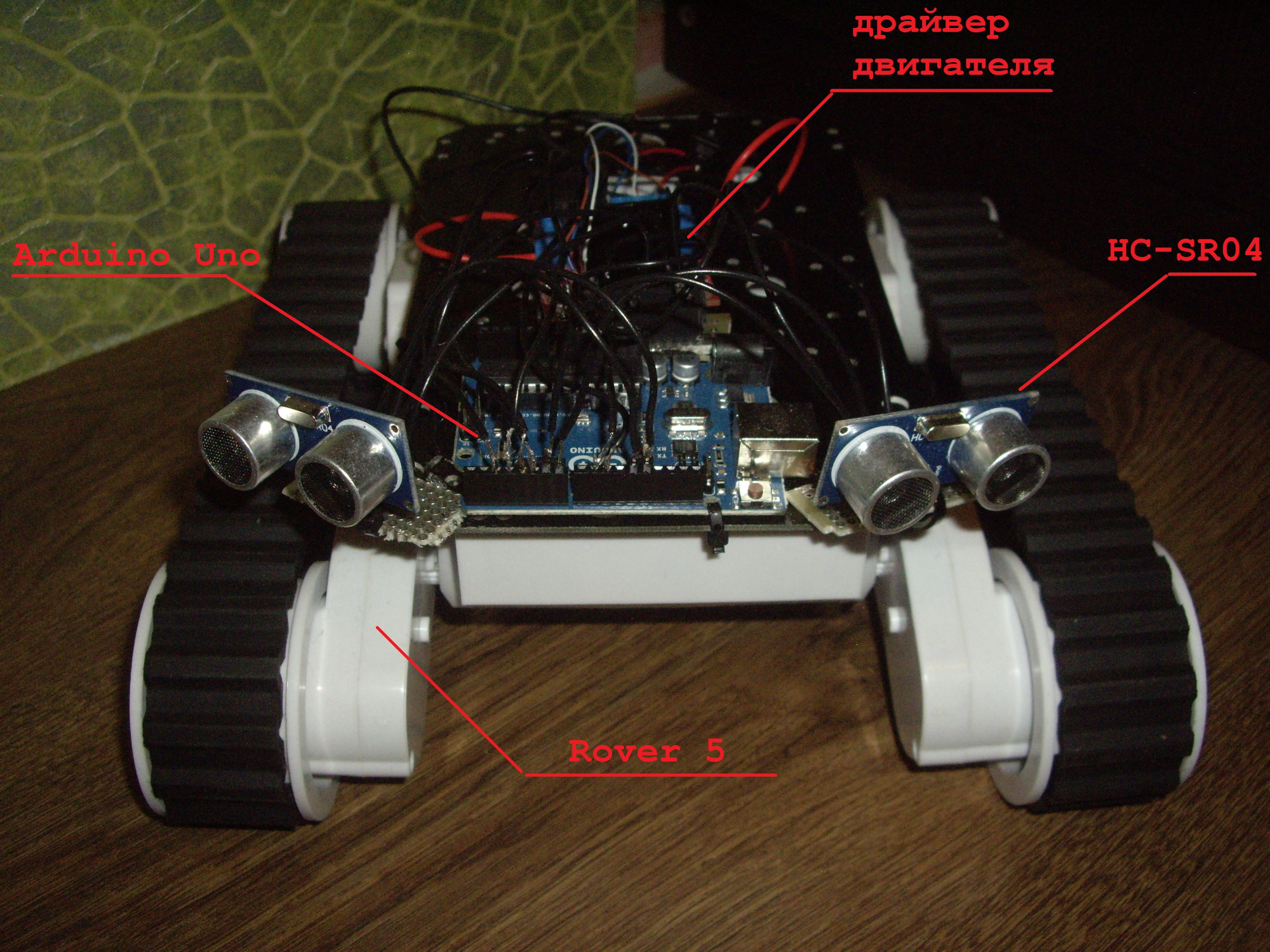
Эта реализация умела ехать вперед и ориентируясь на показатели дальномеров пытаться объехать препятствия. Если оба датчика показывают одинаковые показания - робот отъезжал назад и разворачивался на произвольный угол.
Сейчас
Но прошло 10 лет, появилась куча возможностей, новых устройств. Появился 3д принтер (даже 3), освоена печать различными материалами, опыт программирования, умный дом и вот это вот все.
Поэтому новый план на проект выглядит следующим образом:
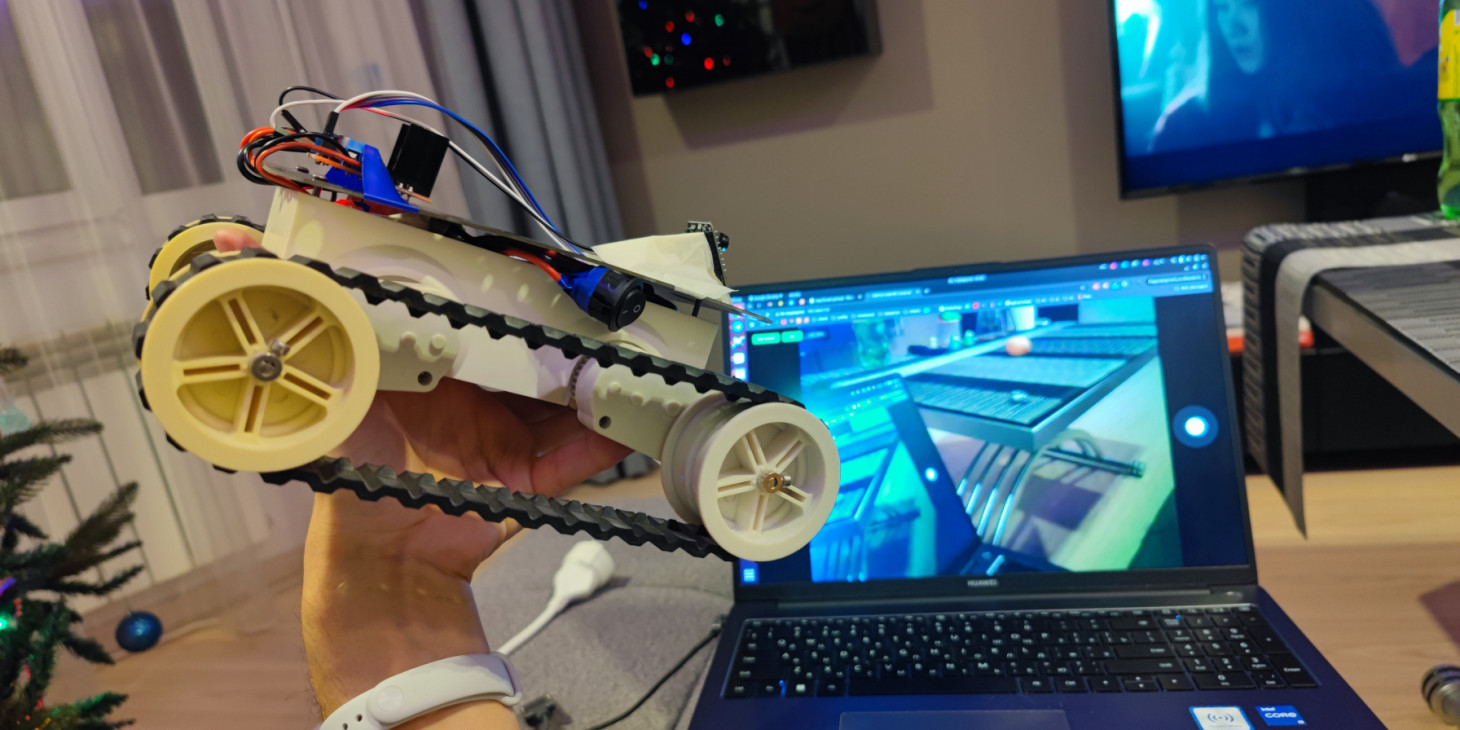
- esp32 cam в качестве контроллера и стриминга видео;
- своя прошивка с управлением по wifi с передачей видео, фонариком, 2 вариантами управления, адаптивной версткий и переключением качества видео, возможно, даже подключим аппу (Radiomaster TX12) по elrs;
- свой дизайн устройства с ИИ;
- свое разработанное шасси - 2WD, возможно 4WD (технически можно хоть 6WD подключить, но бессмысленно);
- полностью 3д-печатный корпус и гусеницы из TPU;
- зарядная станция, на которую можно приехать и встать удаленно;
- плагин для подключения к home assistant.
Все вполне реально и даже наполовину уже реализовано. По крайней мере свое шасси, дизайн и базовая версия прошивки уже готовы.
Раскрою некоторые детали, но обойдусь без особых спойлеров.
Прошивка
Написана на Си с помощью большой кучи ИИ-моделей (перепробовал практически все топ модели, т.к. реализация стриминга видео на esp32 cam оказалась практически неподъемной задачей).
Подробное описание прошивки доступно на guthub, если вкратце:
- управление виртуальным джойстиком или двумя слайдерами (у нас же гусеничная платформа все же);
- SD / HD режим передачи видео, SD для максимального быстродействия, HD для качества картинки (FPS может проседать);
- управление светодиодом - 3 положения 0%, 50%, 100% яркости - встроенный светодиод в esp32cam весьма яркий;
- вывод статистики загрузки ядер контроллера (да, у esp32 2 ядра) различными задачами, эпопею по включению этих функций в esp32 и platformio я писал отдельную статью.
Это не все, что я планирую сделать еще в проекте, но достаточно для MVP.
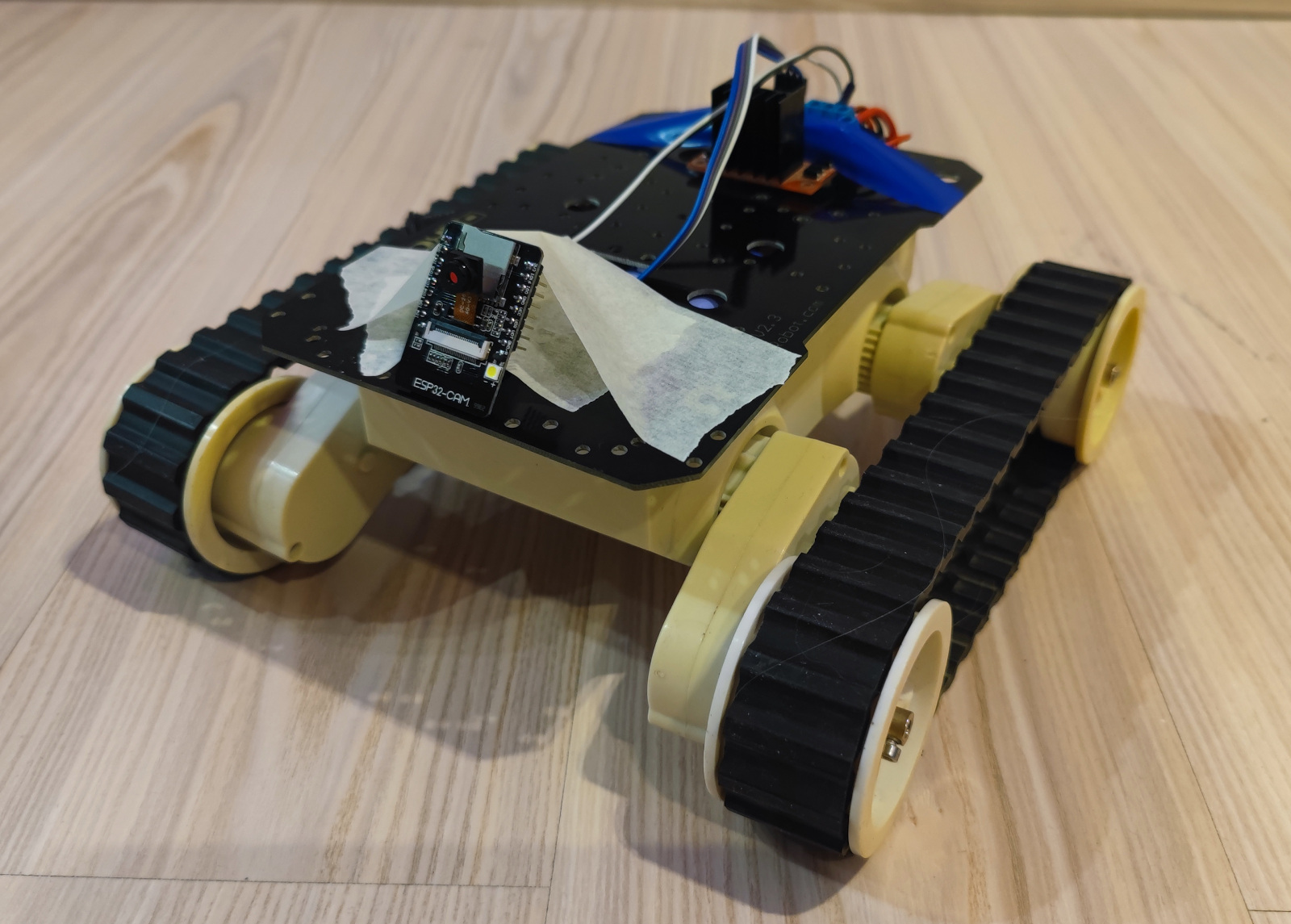
Железки
Покажу пока новую упрощенную схему на базе той же платформы Rover 5:
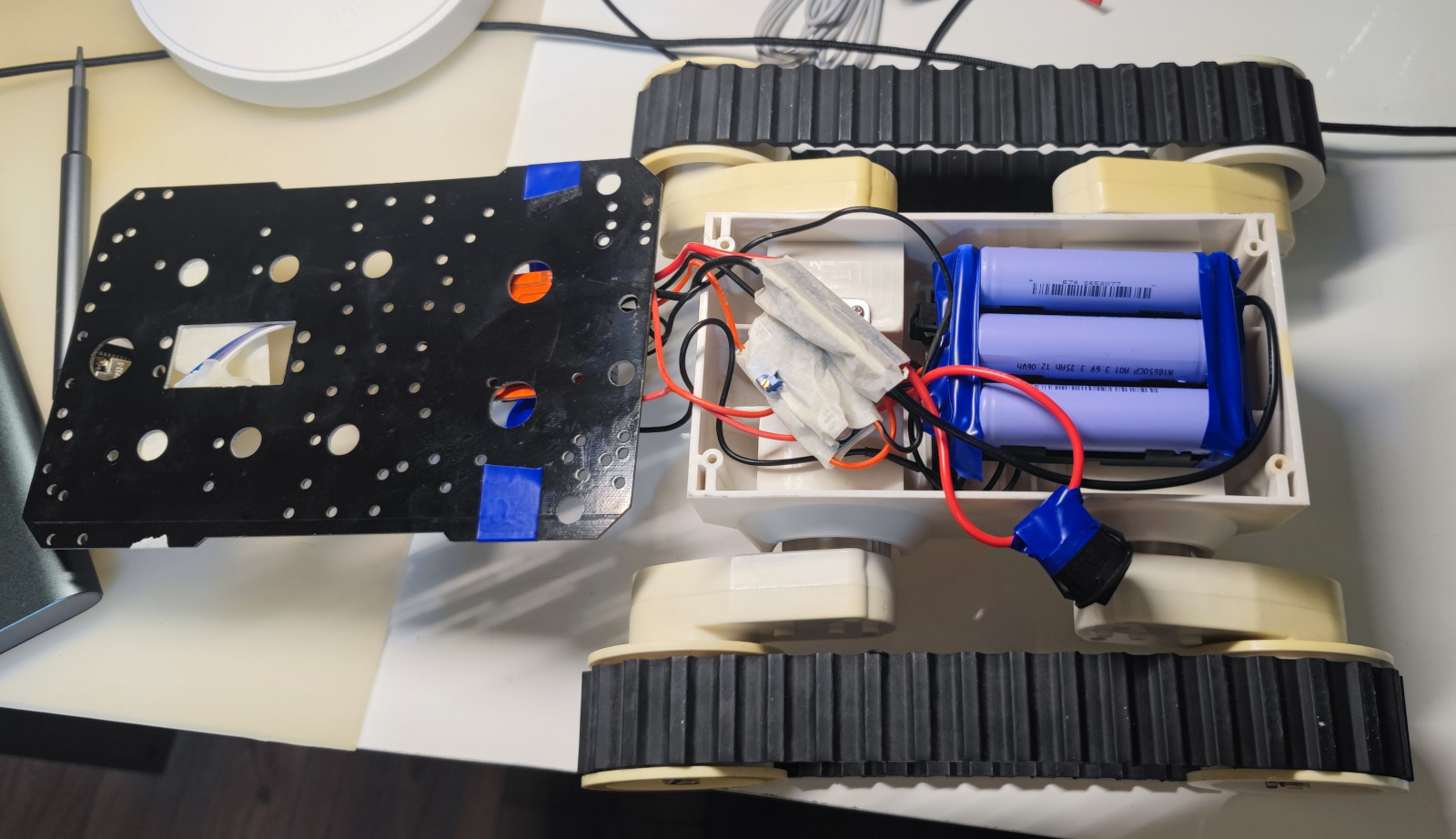
Что у нас здесь есть:
- DFRobot Rover 5 - гусеничная платформа, купленная лет 10 назад у @amperka;
- 3x 18650 аккумулятора с боксами;
- L298N 2-канальный драйвер двигателей;
- ESP32-CAM (можно плату найти еще по названию AI Thinker);
- обычный переключатель для разрыва цепи питания;
- DC-DC понижающий преобразователь, можно универсальный с подстроечными резисторами - 2 штуки (12.6v > 9v, 12.6v > 5v).
Демо
Прошиваем, открываем IP адрес устройства в браузере и управляем:
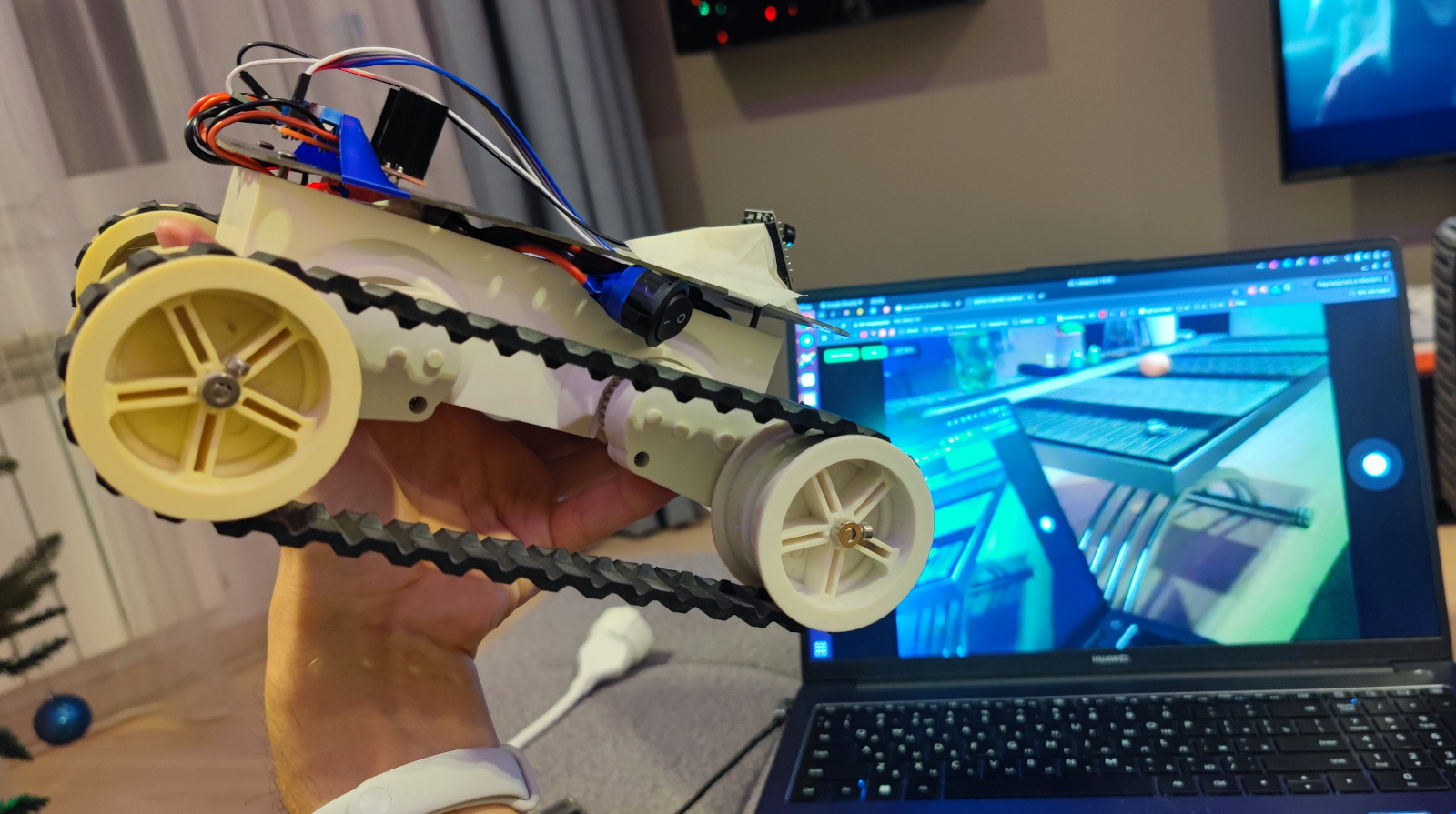
Видео-демонстрация с телефона:
-

Goback - простые бэкапы
Решил тут наконец заняться бэкапами. И без самописных утилит не обошлось. -

Проект Наблюдатель
Проект приурочен к хеллоуину - это статуя одноглазого ктулху с механизированным… -

Универсальный AI Telegram Bot
Хотите в пару действий запустить собственного AI бота для Telegram? -

Анализ истории просмотров Youtube
Задумывались, сколько времени вы проводите за просмотром видео? Давайте считать. -

Image2model с tripo3d и Blender
Иногда хочется, чтобы нарисованный или сгенерированный персонаж стал настоящим -

Локальный эмулятор Telegram
Писали ли вы когда-нибудь телеграм ботов?
Сергей 19.04.2025 16:03
Замечательный проект. Попытался повторить, библиотеку arduino-esp32 для PlatformIO пересобрал, все сделал по инструкции, на этапе сборки ошибки... стандартные примеры для Esp32cam собираются и работают. Где то можно это обсудить?Positroid 22.04.2025 15:12
Обсудить можно на github - если собираете под Windows - вот в этом issues описано - https://github.com/positron48/esp32-caretaker/issues/1, что нужно починить, я не добрался чтобы внести это в readme и сделать кроссплатформенным, сам собирал под Ubuntu.Сергей 22.04.2025 19:41
Я Вас понял, спасибо. Буду изучать.