445
Проект смотритель. Часть 5. Гусеницы
Эта статья является частью цикла
- Проект смотритель. Часть 1. Начало
- Проект смотритель. Часть 2. Дизайн
- Проект смотритель. Часть 3. Фоторезист
- Проект смотритель. Часть 4. Шасси
- Проект смотритель. Часть 5. Гусеницы
- Проект смотритель. Часть 6. Моделирование и печать
- Проект смотритель. Часть 7. Железо
- Проект смотритель. Часть 8. Софт
- Проект смотритель. Часть 9. Зарядная станция
- Проект смотритель. Часть 10. Bluetooth
- Проект смотритель. Часть 11. Home assistant
- Codex написал WASD управление для Смотрителя
Шасси у нас уже есть, периметр известен, внутренний профиль определяется колёсами, внешний - дизайном.
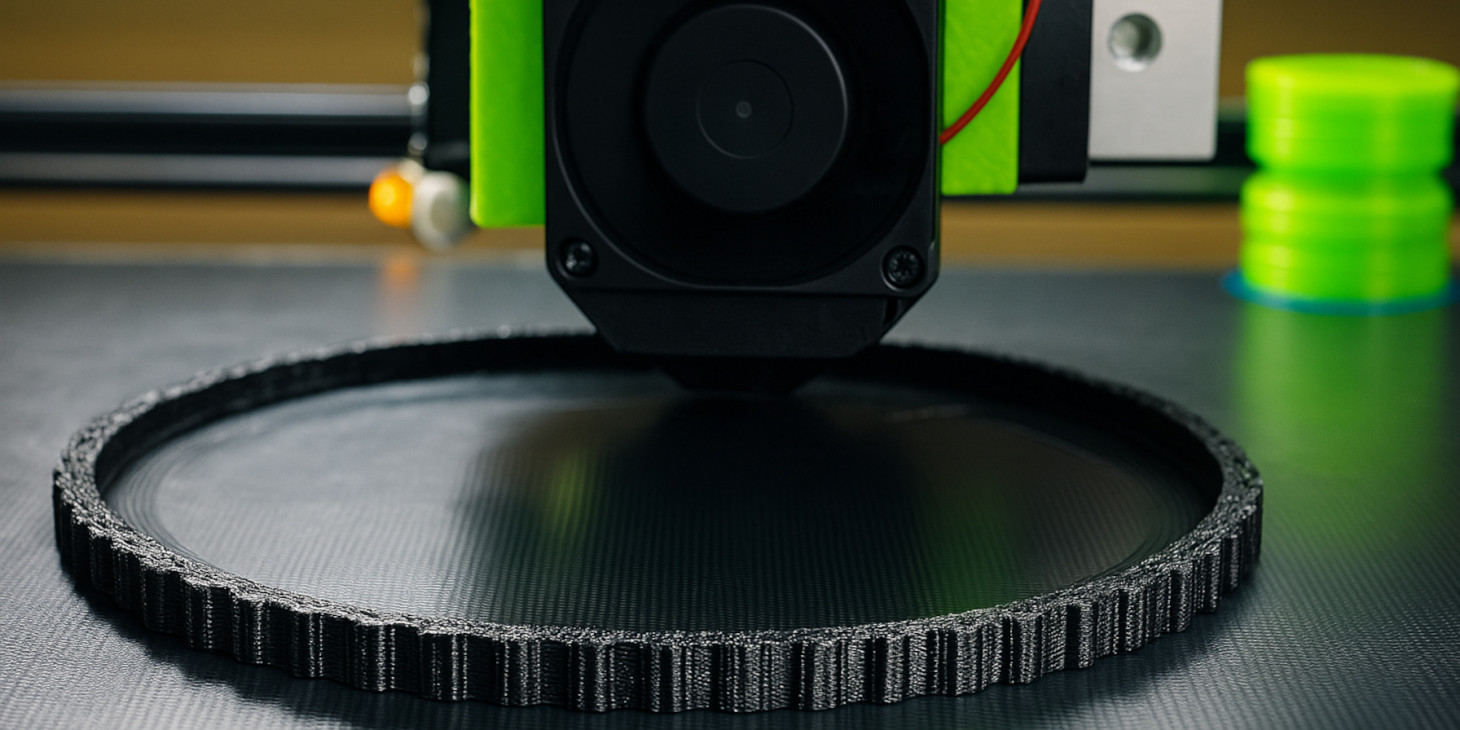
На всякий случай напомню как выглядит дизайн и спроектированные колеса:


Вот так я спроектировал гусеницу:
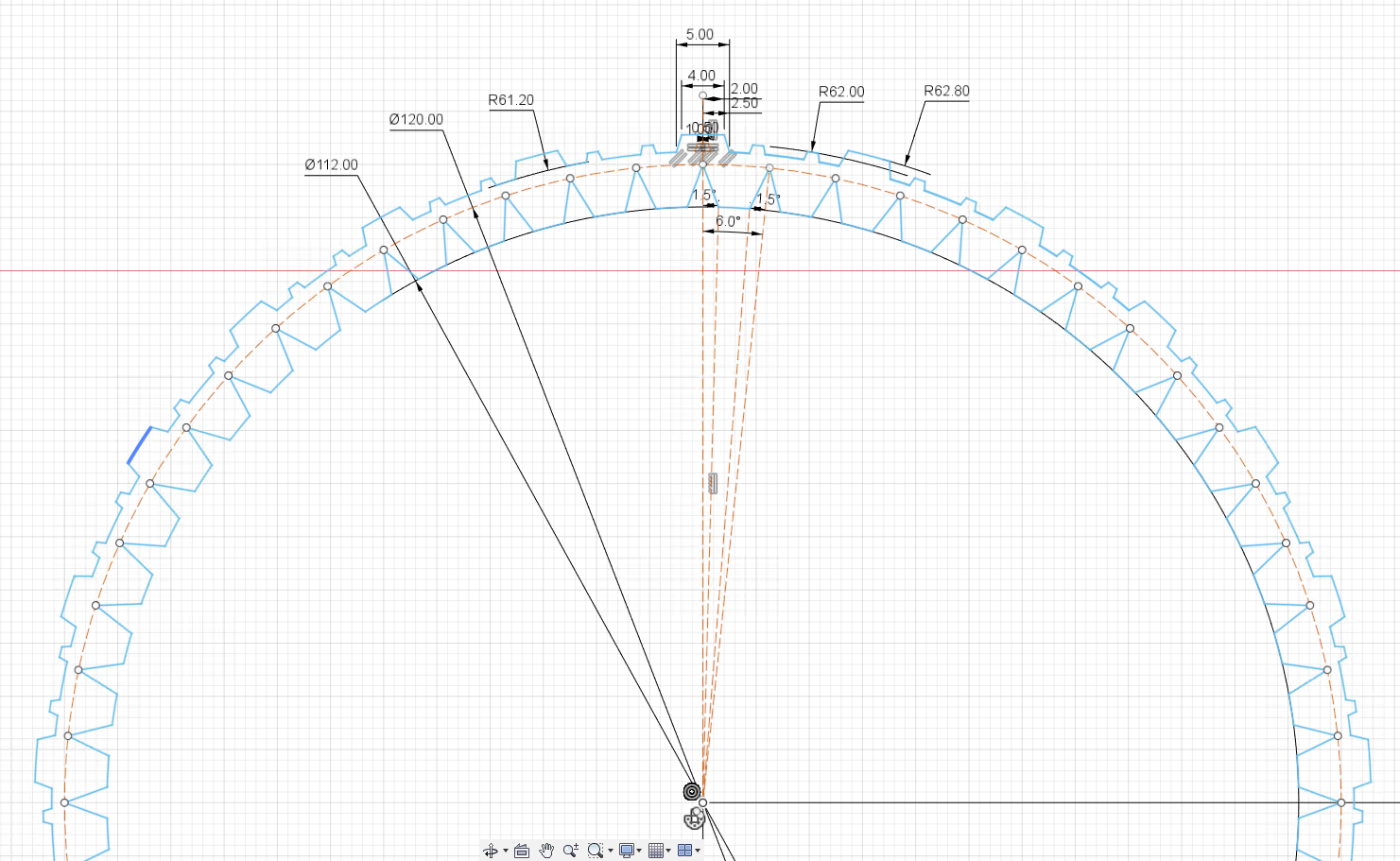
Здесь есть несколько моментов, на которые нужно обратить внимание:
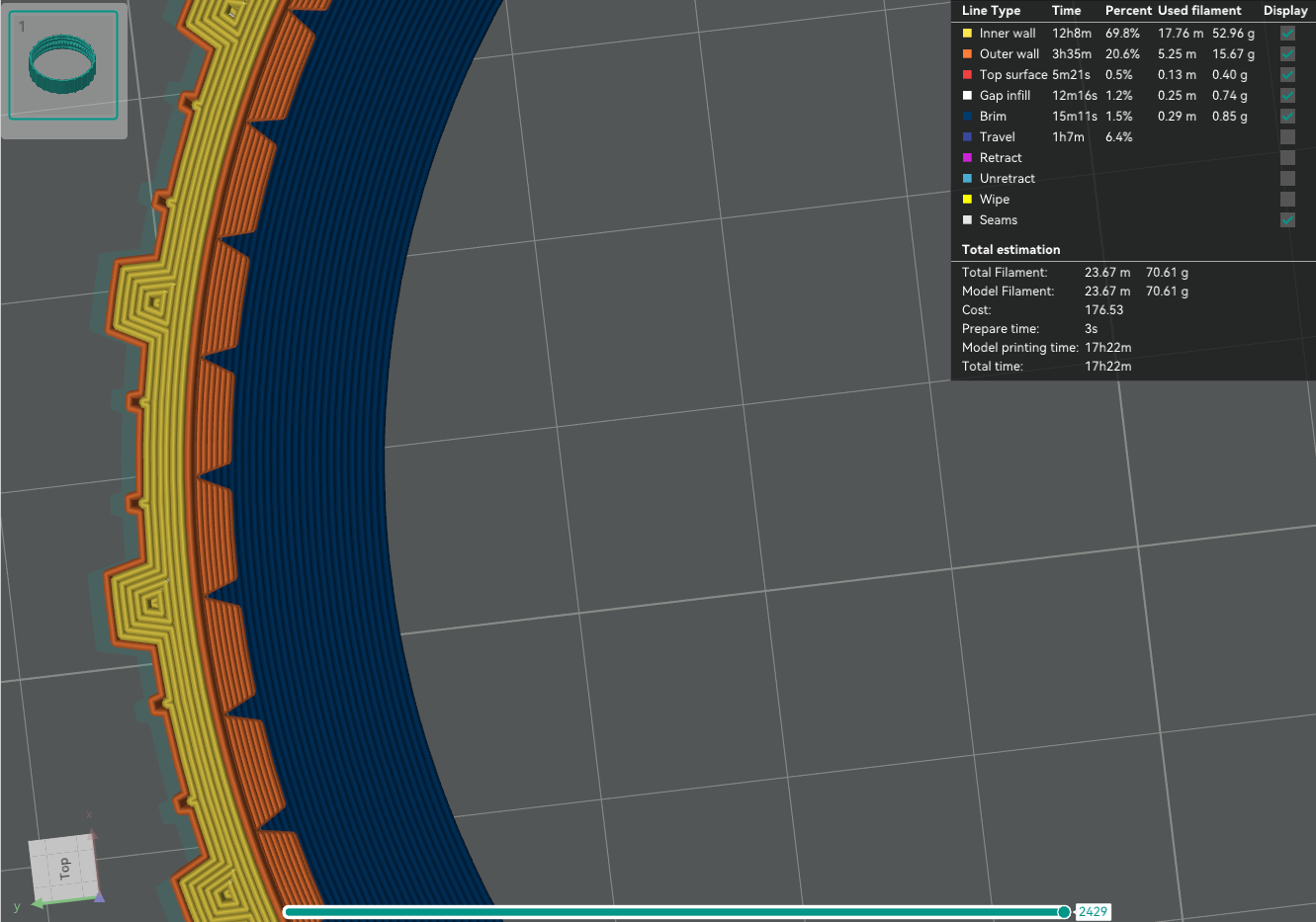
Печатать нужно круглую гусеницу, чтобы в ней не было никаких напряжений и неровностей структуры, которые могут впоследствии сказаться на плавности движения.
Параметры печати подобрать таким образом, чтобы структура была одинакова по всему периметру - по той же причине.
Вот так печатать неправильно:
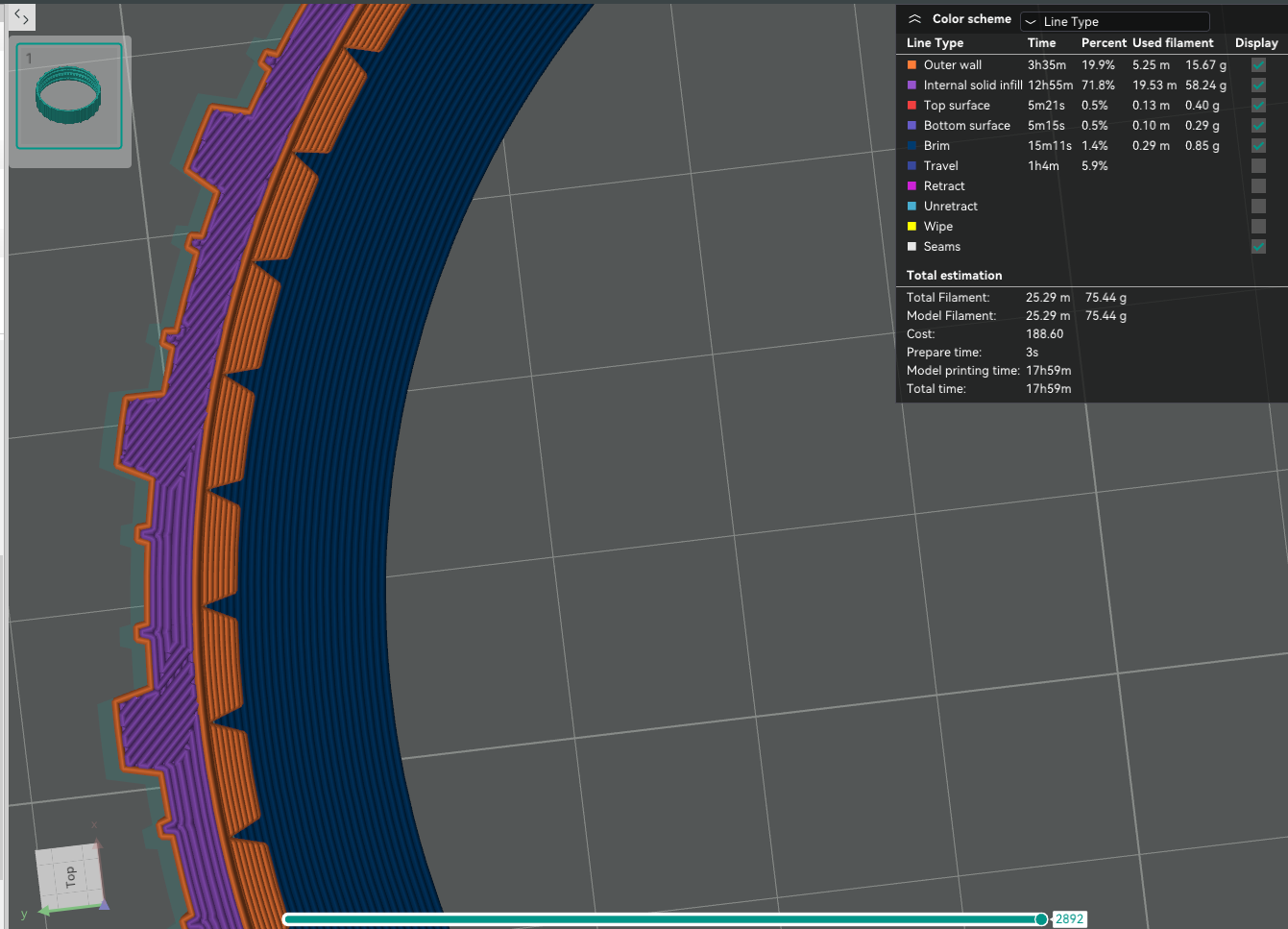
Вот так нормально:
Так как мы печатаем круглую гусеницу, а колесо у нас меньшего диаметра - нужно предусмотреть возможность гусенице беспрепятственно сгибаться до нужного радиуса.
Нам нужно добавить некоторые "разрывы". В ходе изысканий по расчету нужного угла разрыва исписалась пара листов в блокнотике, но угол оказался настолько мал, что можно было запросто его увеличить в несколько раз:
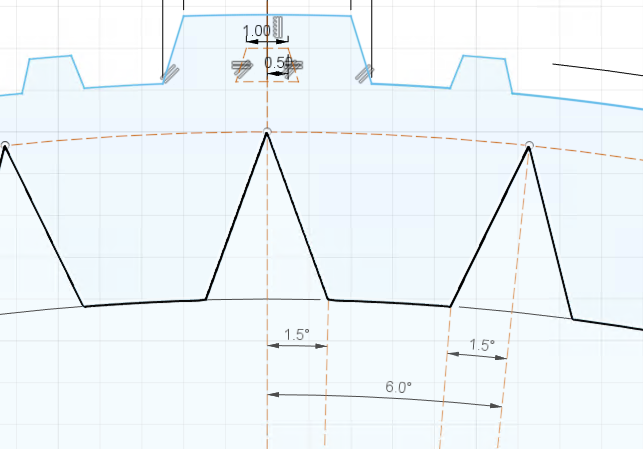
Угол я взял избыточный - во время печати, тем более TPU, может произойти всякое. На фиксацию на роликах такой зазор не особо влияет.
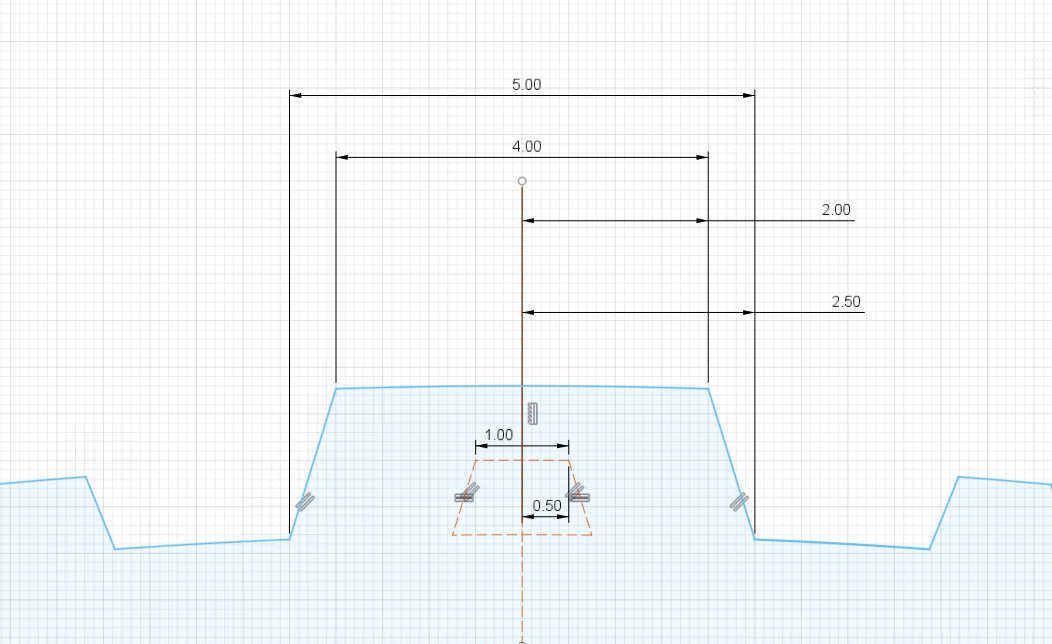
Изначально взял основную толщину в 3мм - но напечатанное изделие оказалась перебором даже для меня, моторчики такую гусеницу крутили с трудом и рывками.

К тому же при такой толщине гусеницы слишком жёсткие - средние ролики оказались не задействованы.
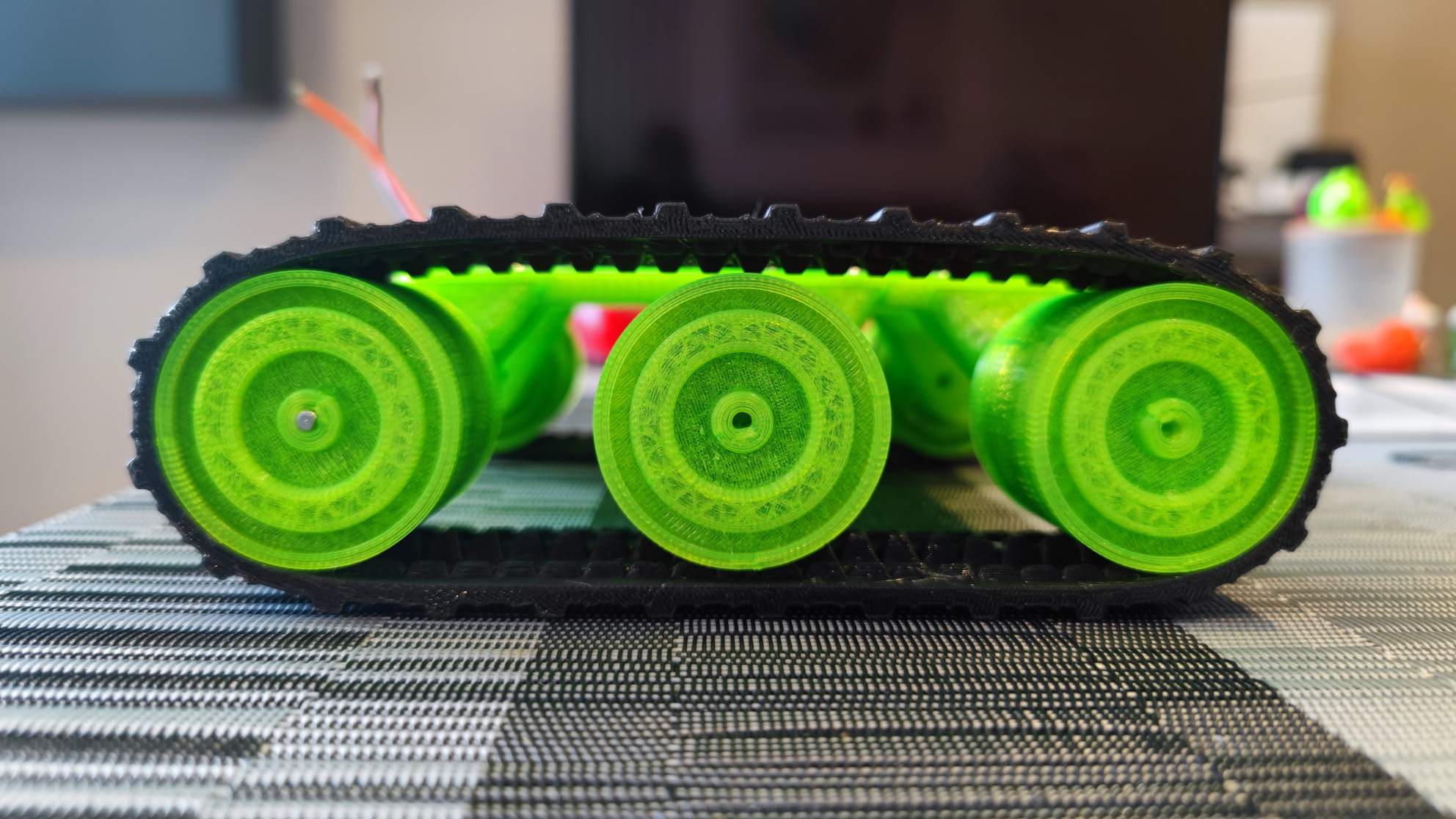
Поэтому толщина была радикально уменьшена вместе с уменьшением высоты шипов - вышло 1.2мм (ровно 3 периметра при печати).
Пластик - bestfilament TPU soft. Пришлось печатать со скоростью в 20 мм/с, иначе даже директ экструдер не справлялся. По гибкости и прочности все более чем ок, пруток 1.75мм руками разорвать у меня не вышло, гусеница отлично подходит.
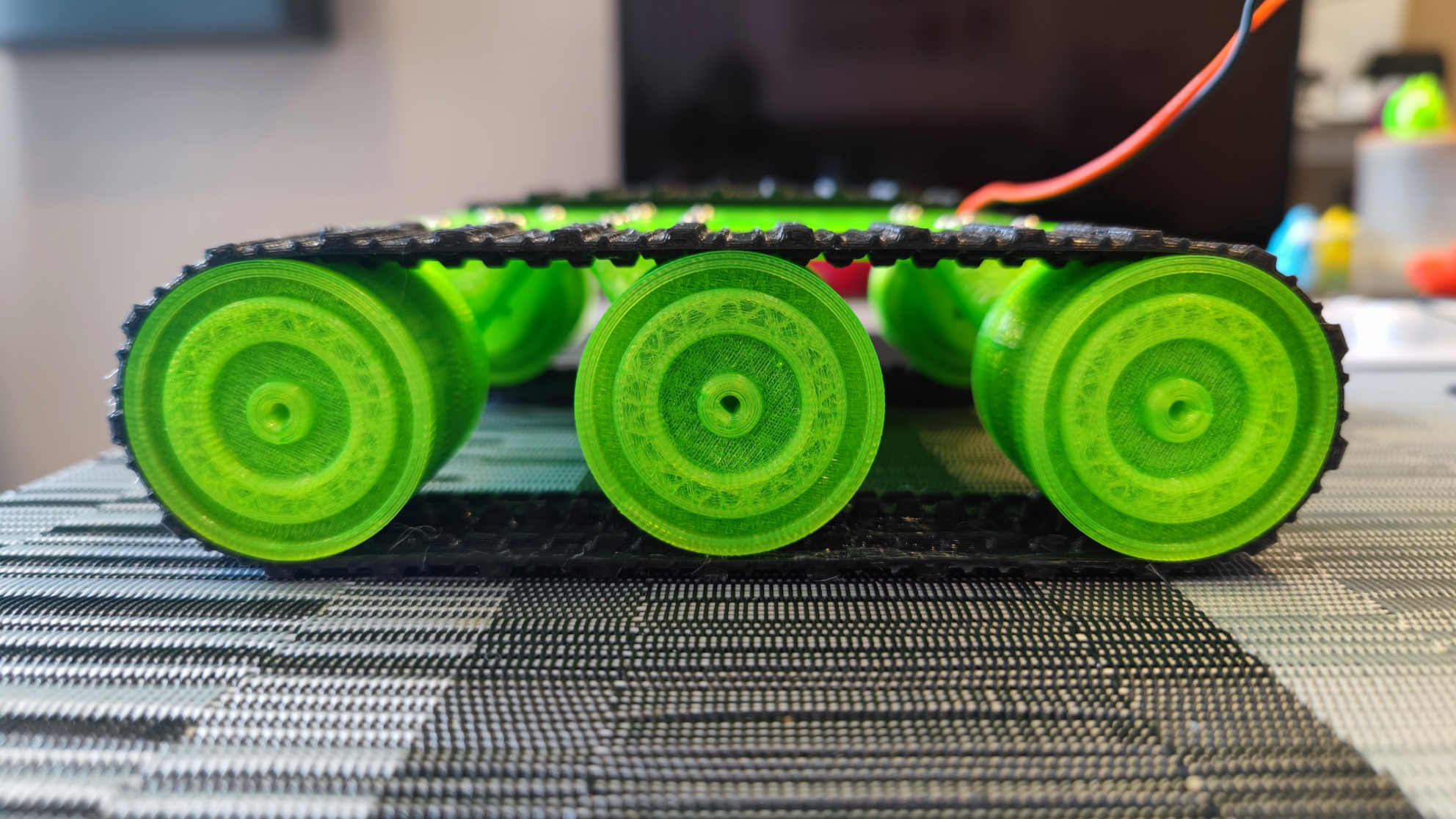
Единственное, где ожидания не были оправданы - зацеп. Поверхность по ощущениям где-то между пластиком и резиной, при перемещении без препятствий все ок, но может проскальзывать при упоре в препятствие - на стену уже не заехать.
Ну и печать не всегда идеально выходила, 1 раз зажевало пластик из-за ретрактов. Ещё раза 3 деталь превращалась в макароны либо появлялись пробелы в слоях. Одна такая гусеница за ночь допечаталась и её даже удалось спасти, заполнив пробелы 3д-ручкой.
Но эстетически она меня не устроила и была перепечатана.
Конечный результат c шасси можно посмотреть на видео ниже. Здесь еще наглядно видно как можно напороться, заказывая моторчики разными партиями или у разных поставщиков. И левый и правый были заявлены с передаточным числом 1:200, но по факту скорость отличается порядочно. А из разных партий моторчики оказались потому, что из изначально купленных 2 штук один решил заклинить и больше не заводиться. Поэтому дальше я заказал сразу 6 штук 1:150, чтобы никаких проблем не иметь (1:200 все же слегка шустроваты для этого проекта, хотя можно было бы и попробовать).
Комментариев пока нет
-

Продолжаем печать после отключения
Печать идет больше суток и в процессе пропадает свет. Знакомо? -

Как я работу в 2026 году менял + бонус
После 10 лет в e-commerce я вышел на рынок -

Goback - простые бэкапы
Решил тут наконец заняться бэкапами. И без самописных утилит не обошлось. -

Проект Наблюдатель
Проект приурочен к хеллоуину - это статуя одноглазого ктулху с механизированным… -

Универсальный AI Telegram Bot
Хотите в пару действий запустить собственного AI бота для Telegram? -

Анализ истории просмотров Youtube
Задумывались, сколько времени вы проводите за просмотром видео? Давайте считать.